Bhuvan's Blog
MicroPython running on NXP VF6XX_M4 core
MicroPython running on NXP VF6XX M4 Core
This is an experimental port of MicroPython for NXP VF6XX M4 Core.
Supported features include:
- REPL (Python prompt) over UART2.
- Garbage collector.
- GPIO, UART support.
Build instructions
The tool chain required for the build is the Linaro provided ARM Embedded toolchain, e.g. 4.9 2015 Q3 update. Unpack the toolchain to an appropriate location.
e.g. your home directory:
$ tar xjf ${HOME}/gcc-arm-none-eabi-4_9-2015q3-20150921-linux.tar.bz2
...
$ export PATH=$PATH:$HOME/gcc-arm-none-eabi-4_9-2015q3/bin/
$ arm-none-eabi-gcc --version
arm-none-eabi-gcc (GNU Tools for ARM Embedded Processors) 4.9.3 20150529 (release) [ARM/embedded-4_9-branch revision 227977]
Copyright (C) 2014 Free Software Foundation, Inc.
This is free software; see the source for copying conditions. There is NO
warranty; not even for MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE.
Then, to build MicroPython for the VF6XX, just run:
$ cd ${HOME}/micropython/vf6xx
$ make
$ ...
This will produce binary images in the build/ subdirectory.
First start
Running a Firmware on Cortex-M4
There are two possible ways to boot the Cortex-M4 core on Vybrid:
- From U-Boot using
m4boot/bootaux - From Linux using remoteproc
Note: In release image 2.7 Beta1, support for m4boot has been dropped from u-boot and remoteproc is the only method to boot and run firmware on Cortex-M4. In release image 2.7 Beta2, support for bootaux has been added including elf boot support.
Note: The FreeRTOS firmware uses Colibri UART_B as its debugging console. Make sure to connect UART_B to your debugging host and start a serial terminal emulator with a baud rate of 115200 on the serial port.
Linux disables unused clocks by default but it is not aware what clocks are used by the Cortex-M4 core. Use the ‘clk_ignore_unused’ kernel parameter to avoid clocks getting accidentally disabled. The power management suspend code and the Cortex-M4 firmware typically use the same SRAM location leading to a resource conflict. To prevent the suspend code from overwriting the M4 firmware and/or remoteproc from not being able to load, the SRAM driver should be disabled by passing ‘initcall_blacklist=sram_init’ kernel parameter:
Colibri VFxx # setenv defargs 'clk_ignore_unused initcall_blacklist=sram_init'
By default, our Linux device tree uses UART_B too, which leads to a external abort when the Linux kernel tries to access UART_B. It is recommended to alter the device tree and disable UART_B using the status property (see [Device Tree Customization]). Temporary, the following fdt_fixup command can be use in U-Boot:
Colibri VFxx # setenv fdt_fixup 'fdt addr ${fdt_addr_r} && fdt rm /soc/aips-bus@40000000/serial@40029000'
Colibri VFxx # saveenv
Booting from U-Boot
Using bootaux
With images 2.7b2 and newer you can boot the Cortex-M4 using bootaux. This command has been adopted from Colibri iMX7, and allows to boot bin and elf files directly.
Colibri VFxx # fatload mmc 0:1 ${loadaddr} firmware.elf
(Or)
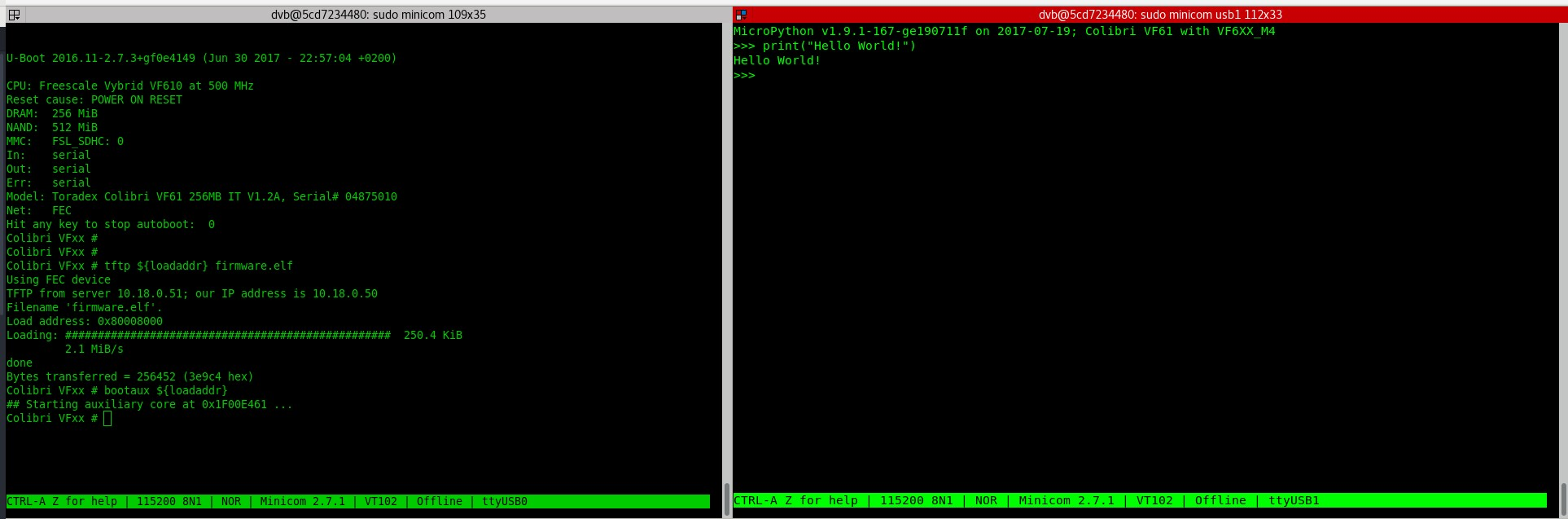
Colibri VFxx # tftp ${loadaddr} firmware.elf
...
Colibri VFxx # bootaux ${loadaddr}
## Starting auxiliary core at 0x1F0002E1 ...
Colibri VFxx #
Store a Firmware on Flash and Run it on Boot
Use the following commands to create a UBI volume to store the Cortex-M4 firmware (to free up space for this volume this process will remove the rootfs volume!). The update scripts are required for this steps, make sure you have a SD-card with the image prepared and in your SD-card slot.
Colibri VFxx # run setupdate
...
Colibri VFxx # setenv create_m4firmware 'ubi part ubi && ubi remove rootfs && ubi create m4firmware 0xe0000 static && run prepare_ubi'
...
Colibri VFxx # run create_m4firmware
...
Colibri VFxx # fatload mmc 0:1 ${loadaddr} firmware.elf
...
Colibri VFxx # ubi write ${loadaddr} m4firmware ${filesize}
...
Colibri VFxx # run update_rootfs
...
Once the UBI volume is in place, a new firmware can be written by just using ubi write:
Colibri VFxx # ubi part ubi
...
Colibri VFxx # fatload mmc 0:1 ${loadaddr} firmware.elf
...
Colibri VFxx # ubi write ${loadaddr} m4firmware ${filesize}
...
You need to extend the default ubiboot command to load and execute the firmware before starting Linux:
Colibri VFxx # setenv ubiboot 'run setup; setenv bootargs ${defargs} ${ubiargs} ${setupargs} ${vidargs}; echo Booting from NAND...; ubi part ubi && ubi read ${loadaddr} m4firmware && bootaux ${loadaddr} && ubi read ${kernel_addr_r} kernel && ubi read ${fdt_addr_r} dtb && run fdt_fixup && bootz ${kernel_addr_r} - ${fdt_addr_r}'
Colibri VFxx # saveenv
Booting from Linux
In our release image (since v2.6.1), by default remoteproc is disabled to allow Cortex-M4 to start from U-Boot. To start Cortex-M4 using remoteproc, deploy the .elf to ‘/lib/firmware’ directory and load the remoteproc kernel modules. To auto load the remoteproc driver during boot, manually add vf610_cm4_rproc.conf file in ‘/etc/modules-load.d/’ with the remoteproc driver specified in the conf file. To have the conf deployed with the image, uncomment the line here in the kernel recipe and re-build the image with OpenEmbedded.
root@colibri-vf:~# cat /etc/modules-load.d/vf610_cm4_rproc.conf
vf610_cm4_rproc
NOTE: remoteproc by default looks for freertos-rpmsg.elf binary in /lib/firmware.
To load a custom .elf one can create a symlink so that freertos-rpmsg.elf points to the actual .elf.
root@colibri-vf:~# cd /lib/firmware/
root@colibri-vf:~# ln -s firmware.elf freertos-rpmsg.elf
root@colibri-vf:~# dmesg|grep remoteproc
[ 4.897291] remoteproc0: vf610_m4 is available
[ 4.909798] remoteproc0: Note: remoteproc is still under development and considered experimental.
[ 4.934253] remoteproc0: THE BINARY FORMAT IS NOT YET FINALIZED, and backward compatibility isn't yet guaranteed.
[ 4.983452] remoteproc0: powering up vf610_m4
[ 5.069934] remoteproc0: Booting fw image freertos-rpmsg.elf, size 160544
[ 5.084654] remoteproc0: No resource table found, continuing...
[ 5.098450] remoteproc0: remote processor vf610_m4 is now up
Serial prompt
You can access the REPL (Python prompt) over UART2 aka UART_B.
- Baudrate: 115200
e.g:
MicroPython v1.9.1-166-ge190711f on 2017-07-19; Colibri VF61 with VF6XX_M4
>>> print ("Hello World!")
Hello World!
>>>